
Vous trouverez ici toutes les informations que vous cherchez me concernant. Il vous reste des questions ? N'hésitez pas à me contacter grâce à la section appropriée.
(Je vous conseille de consulter ce site depuis un ordinateur pour profiter au maximum du design prévu)
Je m'appelle Julien Casanova et je suis ingénieur en système embarqué, électronique et informatique. J'ai créé ce site web afin d'apprendre le développement web par moi même en parallèle de ma formation.
J'essaie de continuer de garder ces informations à jour lors de mon temps libre.
Ce site de présentation a été créé pour compléter mon cv que vous pouvez trouver ici ( en anglais ou en français).

Cursus ISMIN (Ingénieur Spécialisé en Microélectronique et Informatique)
Lors de cette formation, j'ai pu acquérir des compétences de gestion d'équipe et gestion de projet. De plus, l'aspect technique n'est pas laissé de côté. C'est cette deuxième compétence de l'ingénieur qui m'attire le plus.
Au cours de la seconde année de la formation ISMIN, nous avons pu travailler sur un projet dit "industriel". Ce projet m'a permis d'appliquer les compétences théoriques citées précédemment sur un réel projet proposé et suivi par un tuteur industriel (chef d'entreprise). J'ai aussi pu découvrir le management de projet, le droit industriel et la gestion d'équipe.
Durant la troisième année, j'ai pu acquérir une première spécialisation dans le domaine des systèmes embarqués. De plus, j'ai suivi l'enjeu électronique et énergie.
Tout au long de ma formation, lors de différents projets, j'ai eu l'occasion de travailler sur différentes technologies comme un PIC18F2520, plusieurs types de carte STM32, des nucleo 32 et 64, une ZedBoard FPGA. Tous ces projets m'ont permis de travailler sur différents environnements et cibles.
Filière TSI (Technologie et Sciences Industrielles)
Ces deux années de cours intenses m'ont permis d'acquérir deux principales compétences : la rigueur et l'organisation du travail.
Arrivé à la fin de ces deux années, j'ai passé les concours d'entrée aux Grandes Écoles en deux parties, une première série d'épreuves écrites puis une série d'épreuves orales.
Filière STI2D (Sciences et Technologie de l'Industrie et du Développement Durable)
L'obtention de ce diplôme m'a ouvert les portes des classes préparatoires aux Grandes Écoles. De plus, durant mes années de lycée, j'ai pu commencer à manipuler des logiciels et outils informatiques divers comme SolidWorks et Cisco Packet Tracer.
Diplôme de culture générale dans le domaine de l'aéronautique.
Après celà, j'ai continué pendant 2 ans à faire du vol à voile en loisir.













Dans la section ci-dessous, vous trouverez l'ensemble de mes expériences professionnelles et personnelles.
Automatisme pressoir.
Au sein de l'entreprise PERA-PELLENC, je suis responsable du développement de l'automatisme d'une machine en particulier : le pressoir. Le système est composé d'un automate Schneider (gamme M221, M241 et M251) et d'un écran Pro-Face (gamme SP5000). Pour le développement, j'utilise les logiciels SoMachine V4.1, Machine Expert V2.0, Gp-Pro EX 4.09 et Blue. Mes missions sur cette machine sont de développer de nouvelles fonctionnalités et options et de corriger d'éventuels mauvais fonctionnement.
Je suis également responsable de la partie télémaintenance et hypervision avec un boîtier de connexion à distance de chez KEP. Je m'occupe de la configuration de ces boîtiers, de leur connexion à notre interface GateManager et de leur reconnaissance par le service IOT Core de AWS. Pour faciliter la configuration, j'ai développé des scripts Python permettant la configuration quasiment automatique des boîtiers (création de fichiers de configuration, requêtes via l'api AWS, gestion de fichiers Windows etc.).
Ingénieur FPGA stagiaire.
Durant ces 6 mois, j'ai développé un dispositif FPGA venant tester les différentes interfaces d'une autre carte FPGA. Ces interfaces étaient de natures différentes : lien série RS485, UART, SPI, etc. Le développement a été effectué en VHDL et langage C en utilisant la suite logicielle Vivado. J'ai pu caractériser les besoins, réaliser le design de l'électronique, développer et tester mon dispositif.
Réalisation d'un oxymètre de pouls.
Pour ce projet, nous avons pu développer un oxymètre de pouls fonctionnant à l'aide d'OLEDs (Diode électroluminescente organique). Il y avait deux parties dans ce projet : la fabrication de ces OLEDs et la réalisation de la chaîne d'acquisition et du traitement des données. Personnellement, c'est sur cette deuxième partie que j'ai le plus travailler.
Commis de cuisine, préparation du service, réalisation des entrées et desserts.
Cette expérience m'a permis de découvrir le travail sous pression et les mauvaises conditions de travail de certains secteurs.
Développement d'une application de contrôle à distance de température des cuves de vinification au sein d'une cave.
Cette expérience m'a permis de découvrir le travail d'un ingénieur au sein d'un bureau d'étude.
Mise en bière, cérémonies civiles et religieuses, inhumations et crémations.
Cette expérience m'a permis de développer certaines compétences comme l'écoute et la rigueur.
Pratique de la course à pied.
Je pratique la course à pied de façon régulière depuis mon premier semi marathon, le Semi Marathon de Paris en septembre 2021. Depuis cet évènement, je continue à m'entraîner pour continuer à accomplir mes objectifs sur route : Semi Marathon de Maraussan 2022, Marathon de Montpellier 2022, Semi Marathon de Maraussan 2023, Marathon de Paris 2023. Mais également des courses trails : Trail de Molière 2022, Urban Trail Béziers 2022, Trail de Nadal 2022.
Ce sport me demande énormément de persévérance, de rigueur et de régularité.
Pratique du volley-ball en compétition.
Grâce à ce sport, j'ai pu apprendre à faire parti d'une équipe.
Collection de plus de 80 casses-têtes.
Ces puzzles me permettent de développer mon sens logique ainsi que ma dextérité.
Apprentissage de la guitare en autodidacte.
Jouer de la guitare me permet de travailler ma dextérité et ma rigueur.
Dans la section ci-dessous, vous trouverez l'ensemble des projets que j'ai pu réaliser.
Réalisation d'un environnement de capteurs.
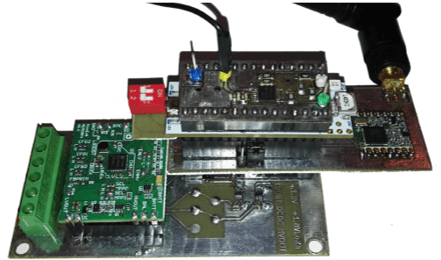
L'objectif de ce projet est d'envoyer les informations reçues par un ensemble de capteur dans une base de données pour pouvoir afficher en temps réel des informations comme la température, l'humidité et l'accélération sur une page web. Pour réussir ce projet, j'ai programmé le microcontrôleur de la carte STM32 contenant les capteurs avec le logiciel Keil µVision 5. Cette carte envoie ensuite ces données à un Raspberry 4 grâce à une communication Bluetooth Low Energy. Ce Raspberry est configuré directement grâce à une connexion SSH. Ensuite, ce Raspberry envoie l'ensemble de ces informations dans une base de données mongodb. Pour terminer, la page web finale vient récupérer les informations sur la base de données grâce à un code javascript.
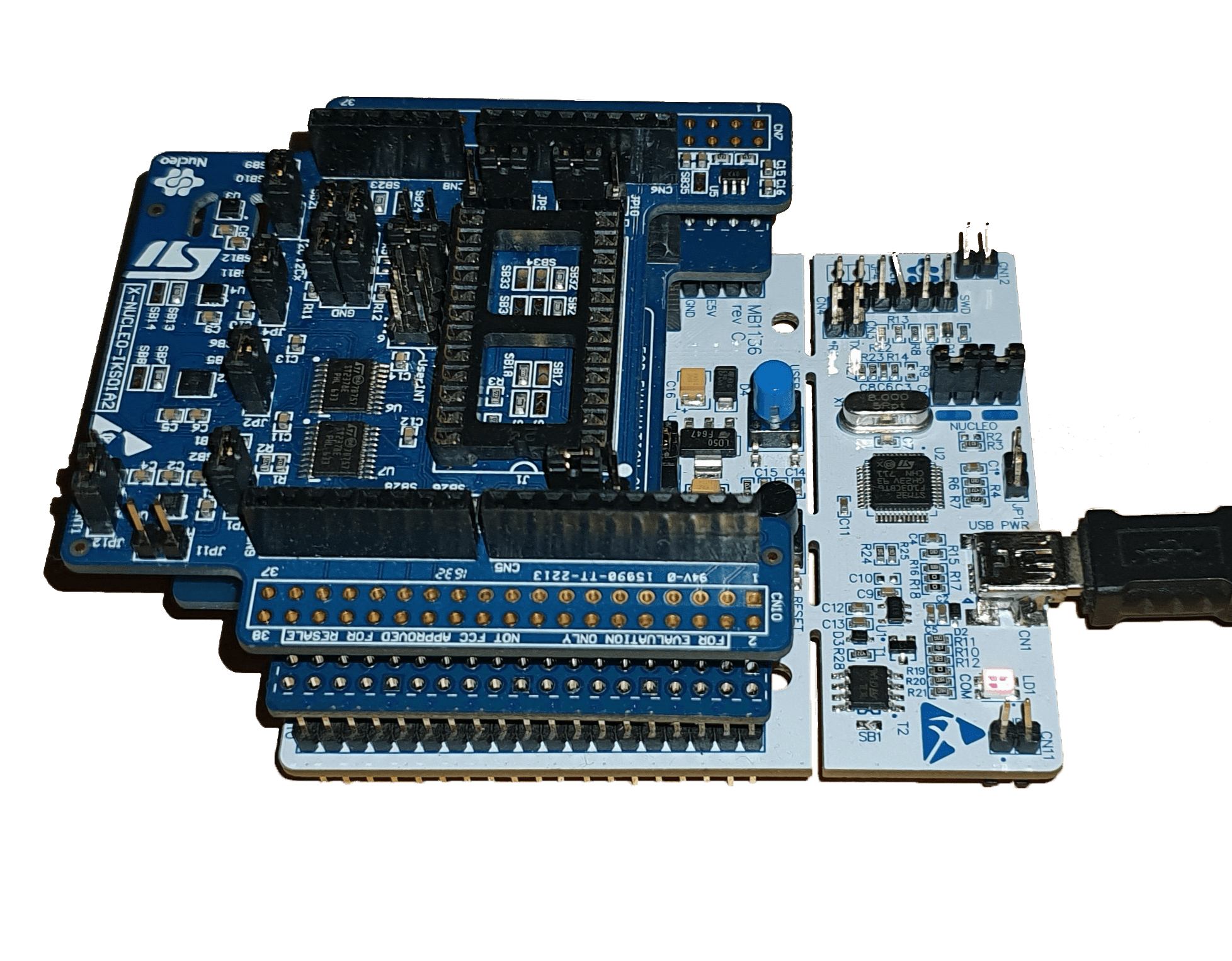 Carte STM32 avec les capteurs et le module BLE
Carte STM32 avec les capteurs et le module BLEImplémentation d'un AES sur cible FPGA
L'objectif de ce projet est d'implémenter un chiffrement AES sur une carte ZedBoard. Cette carte contient un ASIC Zynq-7000 qui est composé d'une partie programmable et deux processeurs ARMv9. Nous avons utilisé la partie programmable pour définir notre propre IP du crypto-processeur et un processeur ARM pour le piloter en langage C. La description matérielle du chiffrement a été réalisée dans un des précédents projets.
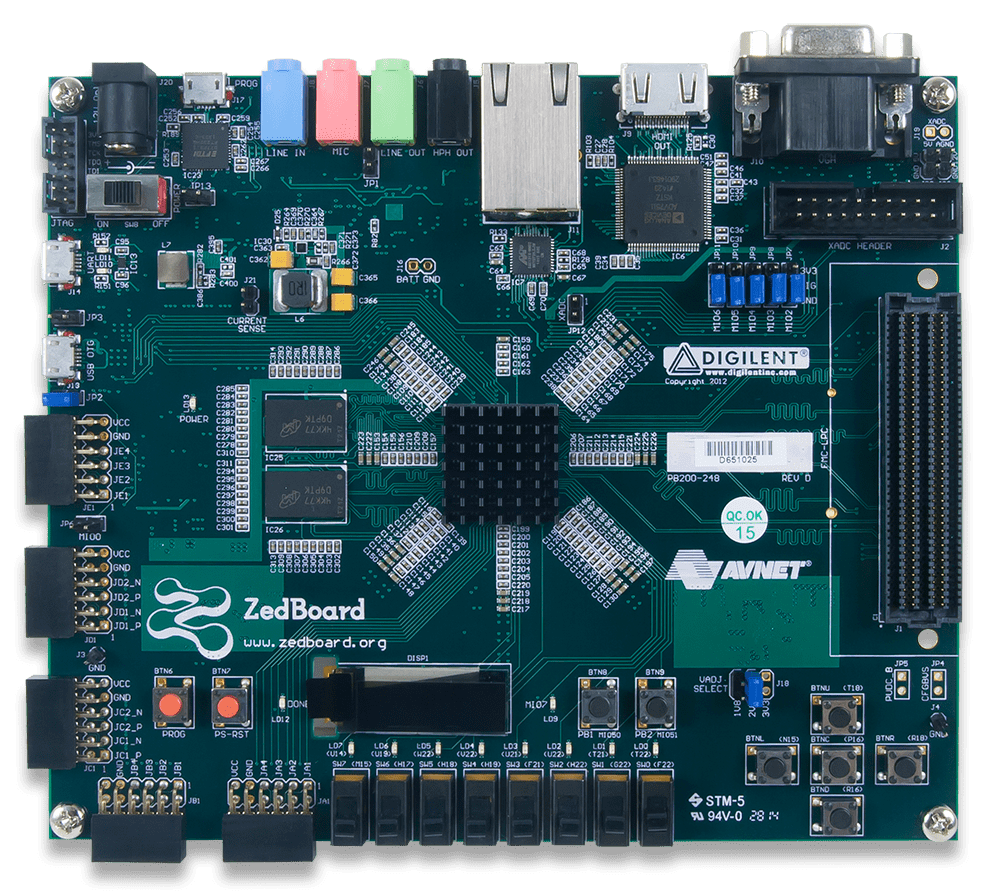 Carte ZedBoard Zynq-7000
Carte ZedBoard Zynq-7000Programmation d'un nouveau robot.
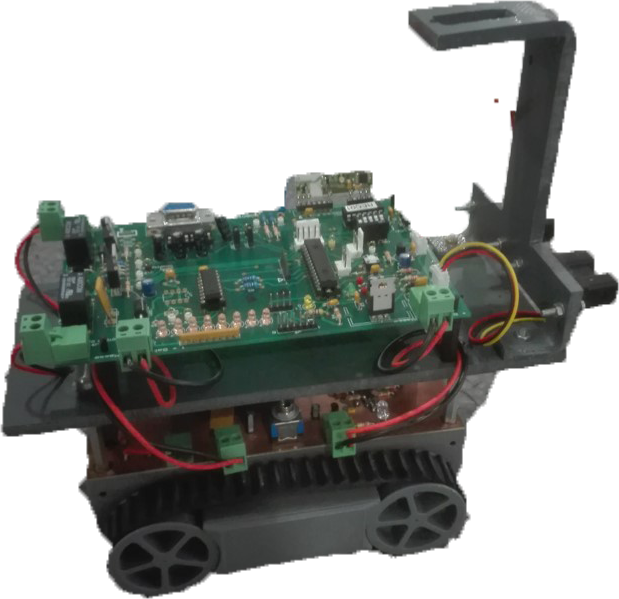
Ce nouveau projet robot est complètement différent des 2 premiers. La gestion de ce robot se fait à l'aide d'un microcontrôleur STM32F103. L'objectif de ce projet était d'implémenter une première fonction de parking automatique. Le robot devait pouvoir retourner à une position précédemment enregistrée à l'aide de son sonar monté sur un servomoteur. La deuxième fonction que nous avons implémentée devait permettre à notre robot de venir se garer à côté d'un premier robot qui lui avait envoyé sa localisation grâce à un module Zigbee.
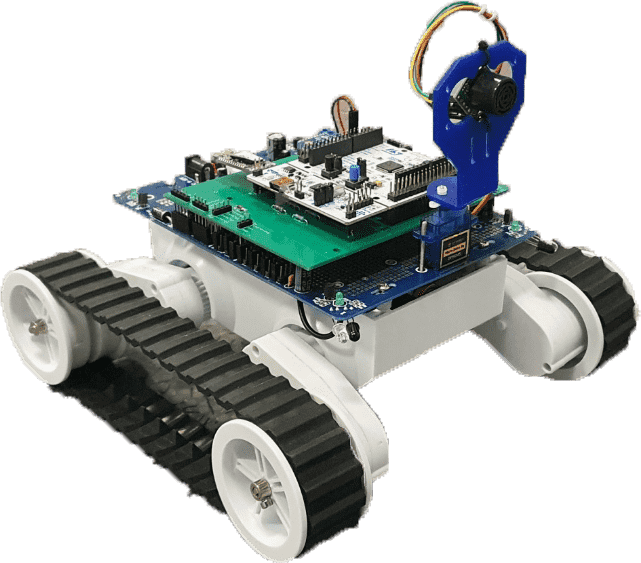 Robot final
Robot finalDéveloppement d'un AES 128 bits en VHDL.
L’objectif de ce projet est de développer en VHDL un algorithme de chiffrement AES 128 bits. Ce projet m'a permis de prendre en main ce langage de description matérielle ainsi que la simulation de ce langage.
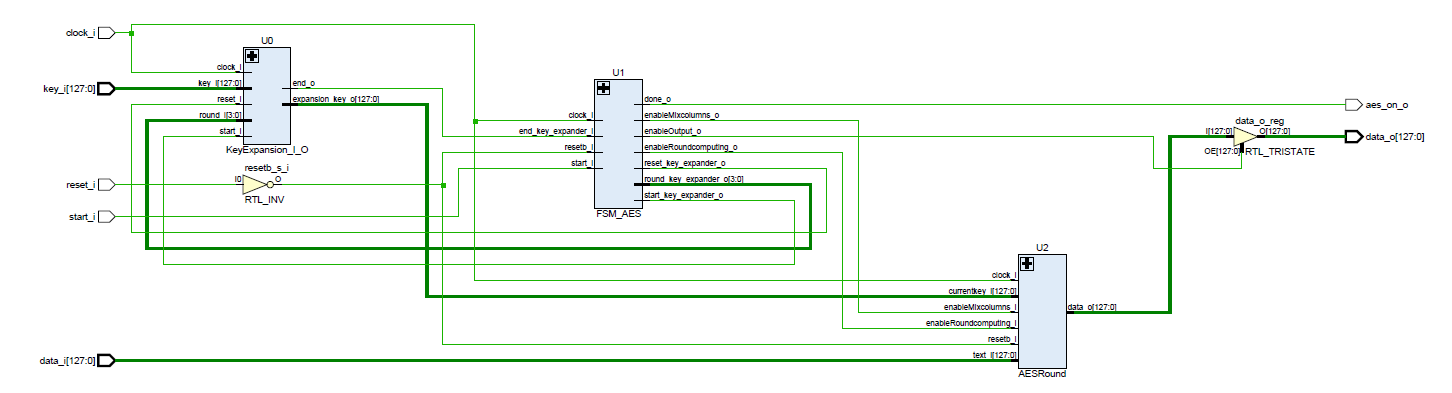 Schéma électrique AES
Schéma électrique AESProgrammation du microcontrôleur PIC18F2520
Durant cette seconde période du projet, nous avons programmé le microcontrôleur de la carte réalisée précédemment. Ce projet nous a permis d'apprendre les bases de la programmation d'un microcontrôleur, la notion d'interruption ainsi que la lecture d'une datasheet.
 Robot assemblé
Robot assembléRéalisation d'un objet autonome.
Au cours de notre troisième année à l’École des Mines de Saint-Étienne, nous avons eu à réaliser un projet dit « OCASS » (Objets Connectés Autonomes Sensitifs Sécurisés). L’objectif de ce projet est de réaliser un objet connecté autonome en énergie pour une application d’agriculture connecté. Nous travaillons sur tous les aspects de ce projet, en partant de la source jusqu’au traitement des données à distance. Pour réaliser cet objet, nous avons découpé la réflexion en trois phases : la modélisation de la chaîne énergétique, la programmation du microcontrôleur et la communication LoRa.
 Dispositif final sans la source d'énergie
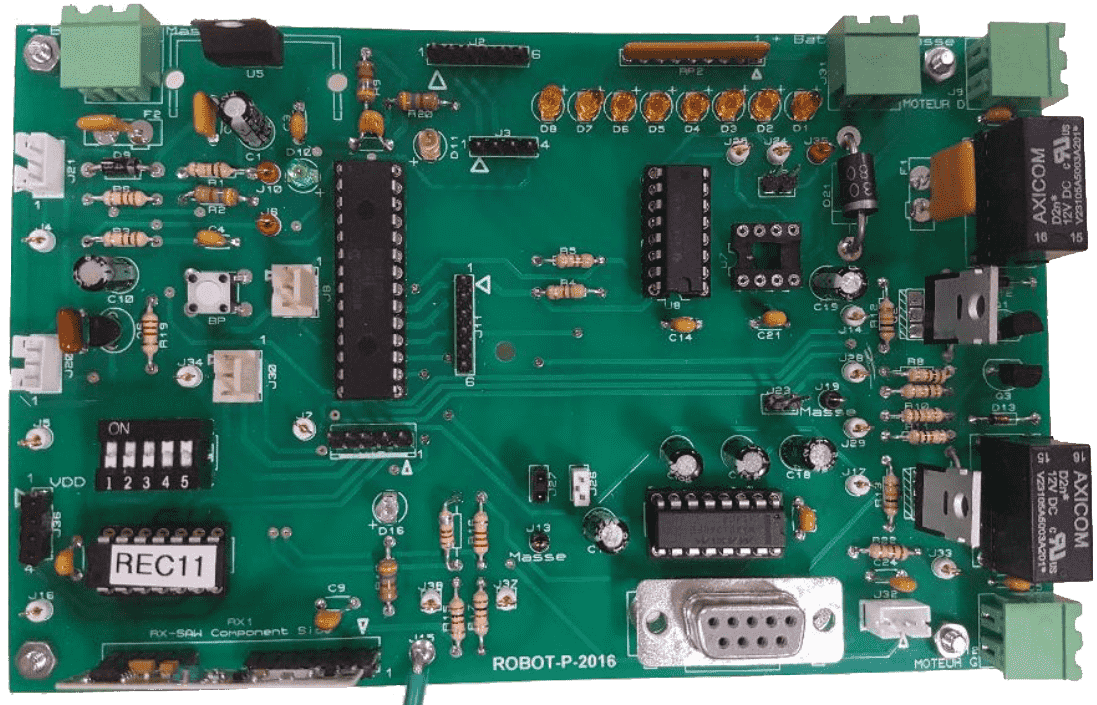
Dispositif final sans la source d'énergieRéalisation d'un carrefour avec un feu tricolore.
L'objectif de ce projet est de reproduire le fonctionnement d'un croisement avec deux feux tricolores et deux feux bicolores pour les passages piétons. Le noyau du microcontrôleur de la carte est un noyau temps réel RTOS. Le moteur présent sur la carte représente le moteur qui abaisse ou remonte une barrière de passage à niveau. L'écran LCD est l'écran du tableau de bord de la locomotive.
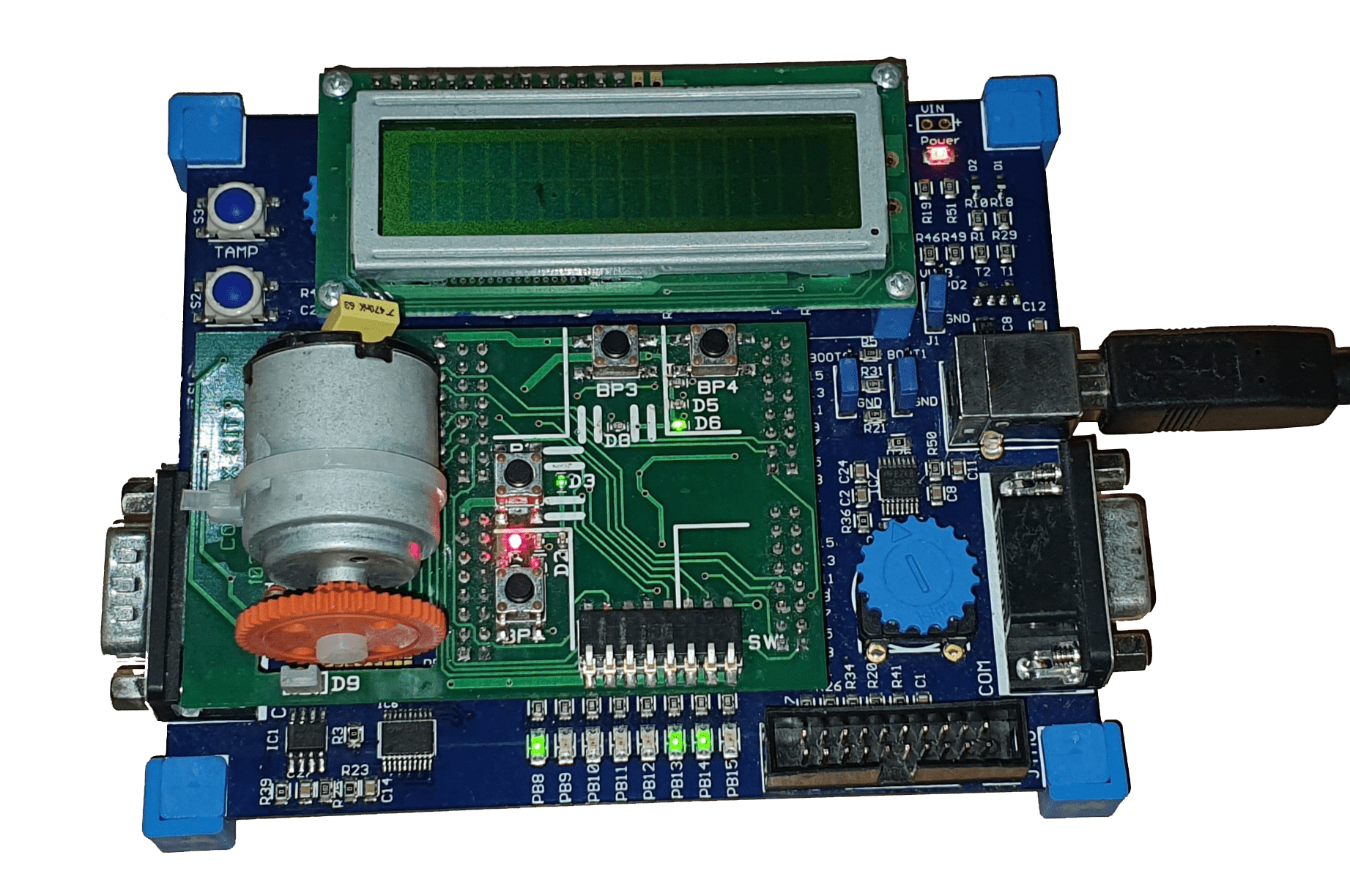 Carte de présentation
Carte de présentationControlle d'une bande LED.
Ce projet avait pour but de contrôler en intensité et en couleur une bande LED grâce à 3 potentiomètres et une carte Arduino. Au vu de la puissance d'alimentation des LEDs, j'ai dû utiliser une alimentation externe et donc contrôler cette alimentation à l'aide de transistors. Une fois le circuit finalisé, j'ai réalisé un boitier à l'aide d'une imprimante 3D pour rendre l'ensemble plus présentable.
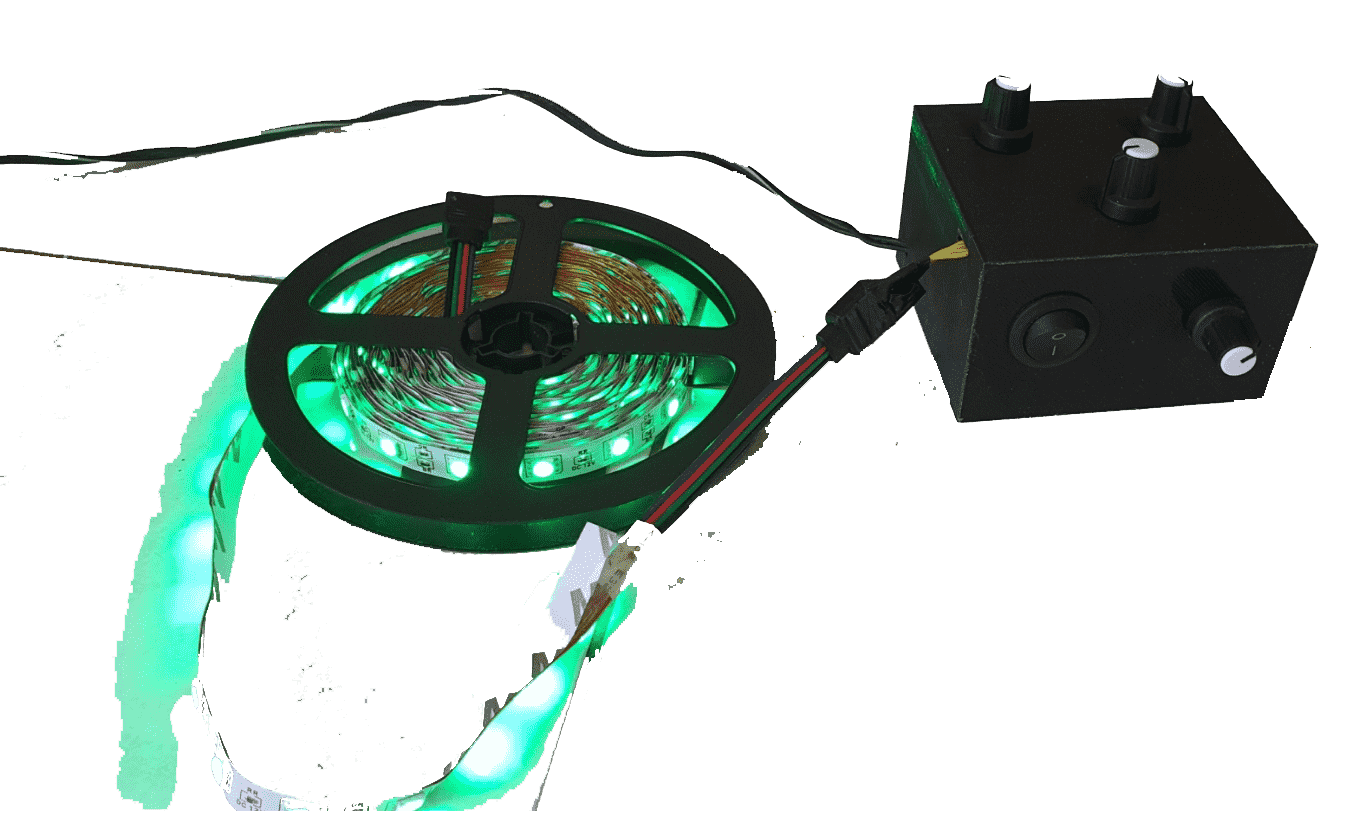 Visuel final
Visuel finalRéalisation d'un système de détection de présence pour musées.
Nous avons été amenés à réaliser un prototype innovant avec du matériel qui nous a été fourni, à savoir : une carte électronique conçue pour recevoir une ou plusieurs électrodes que nous avions étudiées. Ces électrodes peuvent notamment servir pour la détection de présence ou pour la détection d’un appui. Nous avons donc utilisé ce matériel pour réaliser un prototype fonctionnel de détection de proximité. Nous avons réussi à modifier le circuit donné pour pouvoir l'utiliser au maximum sans avoir à en créer un nouveau. Nous avons aussi créé nos propres électrodes adaptées à notre prototype. Vidéo de démonstration ici.
 Circuit imprimé final
Circuit imprimé finalRéalisation d'un cube de 64 LEDs.
Ce projet avait pour but de réaliser un cube de 64 LEDs (4x4x4) et de pouvoir commander indépendemment chacune des LEDs afin de pouvoir afficher le motif voulu. Le cube, assemblé et soudé à la main, était commandé à l'aide d'une carte Arduino nano. Ce projet m'a permis de découvrir l'environement Arduino.
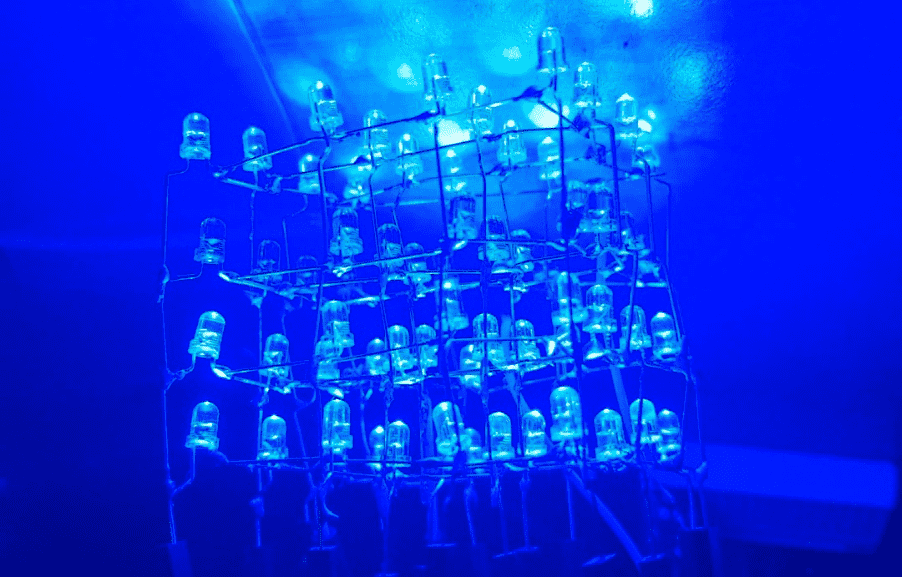 Cube LED allumé
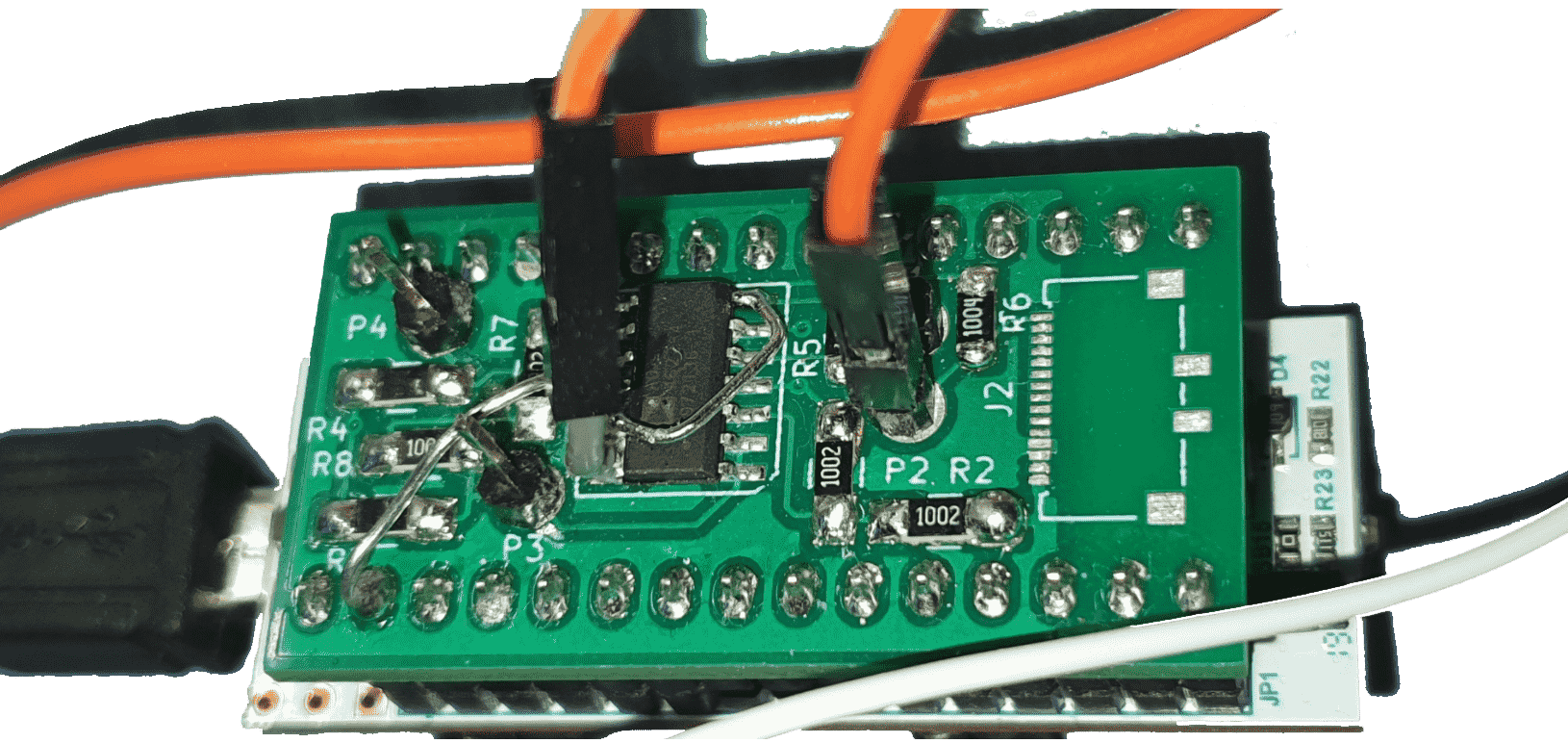
Cube LED alluméRéalisation d'un circuit imprimé pour la commande d'un robot.
Durant ces séances de projet robot nous avons pu comprendre le fonctionnement global d’une carte électronique. Nous avons pu et dû comparer nos valeurs théoriques avec les résultats obtenus lors des tests, ce qui s’inscrit dans une démarche d’ingénieur. Finalement, comprendre la carte nous a permis de mieux appréhender la programmation des différents microcontrôleurs.
 Circuit imprimé final
Circuit imprimé final

